📋 Panorama del Proyecto
Tema Central
Investigar como las variables ambientales y geomorfologicas influyen en la diversidad y distribucion de macrofitas marinas en tres islas costeras de Santa Catarina, con enfoque en el mapeo espacial y el modelado de aptitud de habitat.
Contexto y Relevancia
- Las macrofitas marinas son ingenieras del ecosistema y sostienen alta biodiversidad costera.
- Estas comunidades responden a cambios de temperatura, transparencia del agua y estructura del sustrato.
- La crisis climatica y la presion antropica aumentan la vulnerabilidad de los habitats insulares.
- El proyecto integra inventario biologico, geoprocesamiento y SDMs (modelos que estiman donde es mas probable que ocurra una especie) para apoyar la conservacion aplicada.
El problema que aborda el proyecto
Aun faltan mapas detallados y comparables que muestren donde ocurren las macrofitas marinas en las islas costeras de Santa Catarina y como responden a cambios ambientales. Sin esta base, se dificulta priorizar el monitoreo y planificar acciones de conservacion.
Que se hara en la practica
1) Muestreo de campo
El equipo registra especies, abundancia y condiciones ambientales en las tres islas usando una metodologia estandarizada para permitir comparaciones justas.
2) Mapeo y modelado
Los datos de campo se integran en mapas y modelos para indicar las areas mas favorables para macrofitas y las areas prioritarias de monitoreo.
3) Productos aplicables
El proyecto genera productos cientificos y tecnicos que pueden ser usados por investigacion, gestion ambiental y planificacion de monitoreo costero.
Por que esto importa para no especialistas?
- Ayuda a identificar las areas marinas mas sensibles que necesitan proteccion.
- Mejora la base tecnica para decisiones publicas sobre conservacion costera.
- Crea un registro comparable para seguir cambios a lo largo de los anos.
- Traduce datos complejos en mapas e informacion util para distintos publicos.
Preguntas que responde el proyecto
- Que especies de macrofitas dominan en cada isla y como varian con la profundidad?
- Que condiciones de habitat favorecen mayor ocurrencia y abundancia relativa?
- Como representar espacialmente las zonas prioritarias para monitoreo y gestion?
- Como podrian escenarios de calentamiento desplazar las areas de mayor aptitud de habitat?
Como leer esta presentacion
- Areas de Estudio: muestra donde ocurre el proyecto y por que se eligieron estas islas.
- Objetivos: explica con claridad que busca entregar el proyecto.
- Metodologia: detalla como se recolectan, analizan y transforman los datos en mapas.
- Productos: presenta los resultados esperados para ciencia y gestion ambiental.
- Glosario: define terminos tecnicos en lenguaje accesible.
- Cronograma: muestra cuando se ejecuta cada etapa.
🗺️ Areas de Estudio
Alcance geografico
Tres islas costeras de Santa Catarina con gradiente de tamano, aislamiento y presion antropica.
🟠 REBIO Marinha do Arvoredo
Centroide: 27°13'33"S, 48°21'56"W
Area: 17,131.72 ha
Estatus: Unidad de Conservacion Federal
Distancia de la costa: ~15 km
Rango de profundidad del estudio: 0–15 m
- Mayor area de estudio
- Sitio de referencia de conservacion
- Buceo regulado
- Alta heterogeneidad de microhabitats
- Sustrato rocoso con litorales rocosos y zonas de alta energia
- Mayor potencial para gradientes ecologicos internos
🔵 Ilha do Campeche
Centroide: 27°41'48"S, 48°27'55"W
Area: 76.19 ha
Estatus: Patrimonio arqueologico/paisajistico
Distancia de la costa: ~1.5 km
Rango de profundidad del estudio: 0–15 m
- Proximidad al continente
- Alta presion turistica
- Buena accesibilidad para campo
- Ambiente ideal para evaluar influencia antropica
- Sustrato mixto (rocoso/arenoso) en sectores distintos
- Mayor exposicion a uso recreativo y trafico de embarcaciones
🟢 Ilha Xavier
Centroide: 27°36'36"S, 48°23'11"W
Area: 16.98 ha
Estatus: Sin proteccion especifica
Distancia de la costa: ~8 km
Rango de profundidad del estudio: 0–15 m
- Menor area de estudio
- Conjunto de islotes
- Condicion intermedia de presion
- Area menos estudiada en la literatura local
- Buena sensibilidad para detectar cambios rapidos
- Conectividad intermedia entre continente y Arvoredo
Comparacion completa entre areas de estudio
| Criterio | Arvoredo | Campeche | Xavier |
|---|---|---|---|
| Area (ha) | 17,131.72 | 76.19 | 16.98 |
| Tamano relativo | ~1.000x mayor que Xavier | Intermedio | Menor en el gradiente |
| Distancia de la costa | ~15 km | ~1.5 km | ~8 km |
| Estatus de proteccion | Unidad de Conservacion Federal (REBIO) | Patrimonio arqueologico/paisajistico | Sin proteccion especifica |
| Presion antropica | Baja (regulada) | Alta | Moderada |
| Presion turistica | Controlada | Intensa en verano | Menor que Campeche |
| Accesibilidad logistica | Mas compleja (embarcacion y ventana meteorologica) | Mas simple y rapida | Intermedio |
| Grado de aislamiento | Alta | Baja | Intermedio |
| Complejidad de habitat | Alta (multiples microambientes) | Media (sectores contrastantes) | Media/alta a pequena escala |
| Sustrato dominante | Litorales rocosos con zonas de alta energia | Mosaico rocoso y arenoso | Litorales rocosos e islotes |
| Relevancia para modelado | Referencia para condiciones mas preservadas | Referencia para alta influencia antropica | Referencia para un area pequena y poco estudiada |
| Rol en el gradiente del estudio | Extremo de mayor area/aislamiento | Extremo de mayor uso humano/proximidad | Punto de conectividad intermedia |
🎯 Justificacion de seleccion
La seleccion de Arvoredo, Campeche y Xavier se hizo para representar un gradiente ecologico realista y comparable a escala regional, permitiendo pruebas robustas sobre distribucion de macrofitas y aptitud de habitat.
- Gradiente de area: fuerte contraste entre islas grandes, medianas y pequenas.
- Gradiente de aislamiento: variacion de conectividad con la costa y entre islas.
- Gradiente de presion antropica: desde uso regulado hasta uso turistico intenso.
- Regimenes de proteccion distintos: comparacion entre unidad federal de conservacion y areas sin proteccion equivalente.
- Factibilidad operativa: conjunto con logistica viable para campanas repetidas y modelado espacial.
🗺️ Mapas de las areas de estudio
Los mapas a continuacion muestran la base espacial usada para comparar Arvoredo, Campeche y Xavier. Son productos cartograficos que proveen el contexto territorial del estudio.
Como usar el mapa interactivo: haz clic en el boton de abajo para abrir una visualizacion dinamica de las tres areas de estudio. En el mapa, puedes cambiar capas base, consultar la leyenda y los metadatos cartograficos, usar las escalas grafica y numerica, y acercar/alejar para explorar los detalles espaciales de cada isla.
Abrir mapa interactivo de las areas de estudio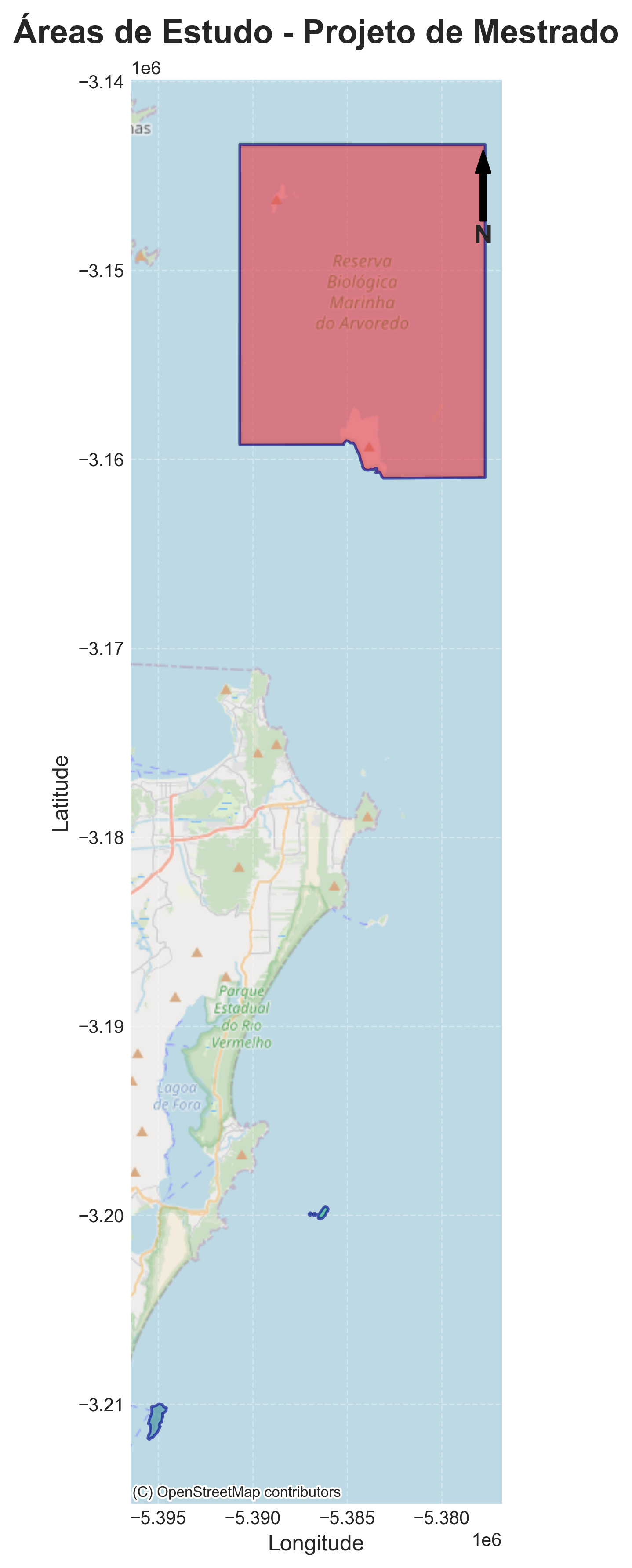
Mapa de referencia de las tres areas insulares de estudio.
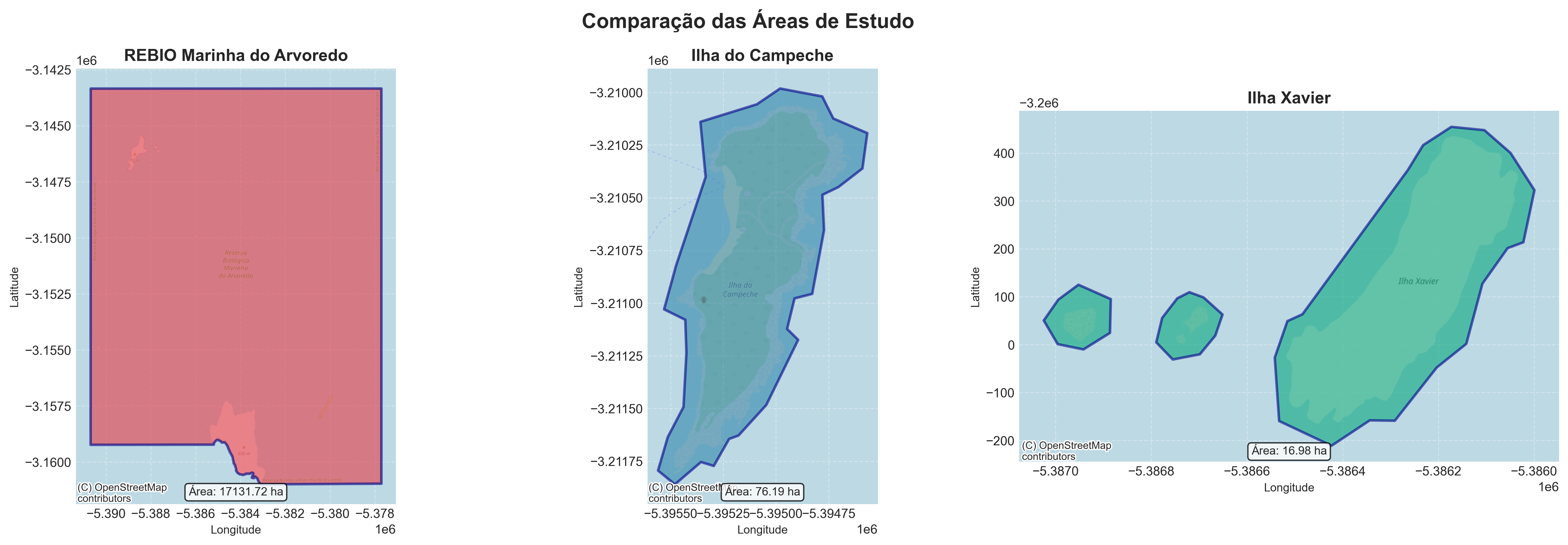
Comparacion espacial de REBIO Arvoredo, Campeche y Xavier.
🎯 Objetivos
Objetivo general
Evaluar la diversidad y la distribucion espacial de comunidades de macrofitas marinas en Ilha do Campeche, Ilha Xavier y REBIO Marinha do Arvoredo, correlacionando patrones biologicos con variables ambientales y geomorfologicas para generar modelos de aptitud de habitat.
Objetivos especificos
1 Inventario floristico
Realizar un inventario de macrofitas en el rango de 0-15 m de profundidad.
2 Mapeo SIG
Mapear la distribucion espacial y la abundancia relativa mediante geoprocesamiento.
3 Fotogrametria con dron
Generar ortofotos y modelos de superficie para refinar el mapeo de habitat.
4 Variables abioticas
Caracterizar sustrato rocoso y variables locales como transparencia del agua.
5 Modelado de habitat
Construir un indice de aptitud de habitat (HSI) y SDMs para estimar patrones de ocurrencia (donde tienden a encontrarse las especies).
6 Coleccion de referencia
Consolidar una coleccion de referencia (herbario) para monitoreo de largo plazo.
🔬 Metodologia
Metodologia en lenguaje simple
La logica del estudio es directa: medir macrofitas en campo, registrar condiciones ambientales y luego transformarlo en mapas y modelos para entender donde es mas probable que ocurra cada especie.
Infografia del flujo metodologico
Resumen visual conectado: desde la colecta en campo hasta los productos finales de conservacion.
Planificacion
Puntos, transectos y logistica.
Muestreo biologico
Apnea/SCUBA, presencia, abundancia (DAFOR) y colecta en litoral rocoso.
Muestreo ambiental
Profundidad, transparencia y sustrato.
Fotogrametria
Ortofoto y DSM con RGB/multiespectral.
SIG
Integracion de datos espaciales.
HSI + SDMs
Modelado de aptitud y distribucion.
Validacion
Verificaciones de campo y metricas de desempeno.
Productos finales
Mapas y sintesis para monitoreo.
1) Como se realizara el estudio
Tipo de estudio: comparacion entre tres islas (Arvoredo, Campeche y Xavier).
Rango de profundidad: 0 a 15 m.
Estrategia: aplicar el mismo metodo en las tres areas para permitir comparaciones justas.
2) Pasos practicos (paso a paso)
| Paso | Que se hara | Resultado esperado |
|---|---|---|
| Paso 1 | Definir puntos de muestreo, transectos y ventanas operativas (marea/tiempo) para cada isla | Plan de campo estandarizado |
| Paso 2 | Realizar muestreo subacuatico por apnea (sectores someros) y buceo SCUBA (sectores mas profundos), con protocolos de seguridad y sistema de dupla | Cobertura estandarizada del rango 0-15 m bajo distintas condiciones de profundidad |
| Paso 3 | Registrar presencia y abundancia de macrofitas (DAFOR), con fotos georreferenciadas por punto/transecto | Lista de especies e intensidad de ocurrencia por punto e isla |
| Paso 4 | Colectar material en litoral rocoso (muestras/ejemplares) con rotulado, almacenamiento y trazabilidad | Material de referencia para confirmacion taxonomica y herbario |
| Paso 5 | Registrar variables ambientales en el mismo punto (ej.: transparencia, profundidad, tipo de sustrato, geomorfologia) | Datos ambientales vinculados a registros biologicos |
| Paso 6 | Georreferenciar todos los datos en SIG e integrar datos de campo, dron y capas ambientales | Base espacial organizada, auditable y comparable entre campanas |
| Paso 7 | Calcular HSI, ejecutar SDMs y validar resultados con datos de campo independientes | Mapas de aptitud y distribucion potencial con control de calidad |
| Paso 8 | Revisar consistencia final, generar mapas tematicos y consolidar productos para disertacion y gestion | Productos tecnicos y cientificos listos para uso y comunicacion |
🧭 Protocolo de muestreo subacuatico y colecta en litoral rocoso
- Apnea: aplicada en sectores someros con ritmo operativo rapido y registro estandarizado por transectos.
- Buceo SCUBA: aplicado en sectores mas profundos del rango del estudio (hasta 15 m), manteniendo tiempo de fondo y seguridad del equipo.
- Colecta en litoral rocoso: retiro cuidadoso de muestras representativas, minimizando impacto y manteniendo georreferenciacion por punto.
- Trazabilidad: codigo unico de muestra, etiqueta de campo, foto de contexto y registro de profundidad/sustrato.
3) Que se medira en campo
📌 Datos biologicos
- Metodo de muestreo (apnea y/o SCUBA)
- Presencia/ausencia de especies
- Abundancia relativa (DAFOR)
- Registro fotografico de apoyo
- Colecta de ejemplares en litoral rocoso para herbario
🌊 Datos ambientales
- Profundidad
- Transparencia del agua (Secchi)
- Tipo de sustrato
- Geomorfologia (grieta/hendidura, bloque/pared, laja)
🗺️ Datos espaciales
- Coordenadas de puntos
- Capas por isla
- Mapas de ocurrencia
- Mapas de aptitud
4) Fotogrametria con dron (lenguaje simple)
La fotogrametria con dron transforma multiples fotos aereas en mapas detallados y medibles del area costera.
- Que se genera: ortofotos (imagenes corregidas, sin distorsion) y un Modelo Digital de Superficie (DSM).
- Como ayuda: mejora el mapeo de rasgos de habitat y del contorno del litoral rocoso.
- Ventaja practica: mayor precision espacial para comparar campanas en el tiempo.
- Integracion: los productos de dron se incorporan al SIG junto con datos de buceo.
En resumen: el dron mejora la base cartografica del estudio y aumenta la confianza en los modelos de habitat.
🔎 Protocolo de prueba: RGB vs Multiespectral
Para fortalecer la metodologia, se realizara una prueba comparativa entre camara RGB y camara multiespectral en la misma area y bajo condiciones similares de marea e iluminacion.
| Etapa de prueba | Como se ejecutara | Producto/Indicador |
|---|---|---|
| 1. Planificacion de vuelo | Misma area, igual altitud y solape para ambos sensores | Comparacion justa entre RGB y multiespectral |
| 2. Adquisicion de datos | Ventana corta de vuelo para reducir variacion de luz, viento y mar | Conjunto de imagenes pareadas |
| 3. Procesamiento fotogrametrico | Generacion de ortomosaico y DSM para ambos sensores | Ortofotos y modelos de superficie comparables |
| 4. Productos espectrales | En multiespectral, calcular indices (ej.: NDVI/GNDVI/NDRE o equivalente costero) | Capas para discriminar tipo de cobertura y vigor de vegetacion |
| 5. Metricas de resolucion | Comparar GSD, nitidez visual y error geometrico (RMSE de checkpoints) | Desempeno espacial objetivo por sensor |
| 6. Validacion ecologica | Contrastar mapas con puntos de campo (presencia/ausencia y DAFOR) | Exactitud tematica para habitat/macrofitas |
| 7. Sintesis final | Comparar ventajas de sensores y recomendar uso aislado o combinado | Protocolo optimizado para campanas futuras |
📏 Tabla operativa integrada de prueba (parametros y criterios de calidad)
| Indicador | Meta ideal | Rango aceptable | Como verificar | Accion correctiva |
|---|---|---|---|---|
| GSD (resolucion en suelo) | 2–5 cm/pixel | hasta 7 cm/pixel | Informe de procesamiento fotogrametrico | Ajustar altitud de vuelo y/o distancia focal |
| Solape frontal | 80% | 75–85% | Plan de vuelo + registro del dron | Recalcular lineas de vuelo y velocidad |
| Solape lateral | 70% | 65–75% | Plan de vuelo + inspeccion del ortomosaico | Reducir el espaciamiento entre franjas de vuelo |
| Altitud de vuelo | 60–100 m (segun el sensor) | hasta 120 m (normativa vigente) | Telemetria del dron y cuaderno de campo | Estandarizar la altitud por campana y sensor |
| Velocidad de vuelo | 3–6 m/s | hasta 8 m/s | Registro de la mision | Reducir la velocidad en condiciones de mar/agitación y viento |
| Horario de adquisicion | 10:00–14:00, baja nubosidad | 9:00–15:00 | Registro de campo y metadatos EXIF | Reprogramar el vuelo para reducir sombra y reflejo |
| Condiciones de mar/viento | Mar calmo y viento bajo | viento hasta ~20 km/h | Boletin meteorologico + observacion local | Suspender el vuelo en condiciones criticas |
| RMSE geometrico | < 10 cm | 10–15 cm | Puntos de verificacion/GCPs independientes | Rehacer el ajuste del bloque y revisar los GCPs |
| Densidad de GCP/punto de verificacion | Distribuidos en todo el mosaico | minimo 5 puntos bien distribuidos | Mapa de puntos de control | Agregar puntos en bordes y centro |
| Calidad radiometrica (multiespectral) | Panel de calibracion antes/despues del vuelo | Al menos 1 calibracion por mision | Metadatos e imagenes del panel | Recalibrar y repetir la adquisicion si es necesario |
| Validacion tematica | Exactitud global > 85% y Kappa > 0.75 | Exactitud > 80% y Kappa > 0.65 | Matriz de confusion con puntos de campo | Revisar clases, entrenamiento y muestreo |
| Reproducibilidad entre campanas | Mismo protocolo y parametros clave | Diferencias documentadas y justificadas | Lista de verificacion de estandarizacion por campana | Actualizar el protocolo y registrar desviaciones |
🌤️ Fuentes meteorologicas y software de planificacion de vuelo
| Fuente/Herramienta | Cuando consultar | Proposito | Criterio practico (despegar/no despegar) |
|---|---|---|---|
| INMET (pronostico y alertas) | 24–48 h antes y en la manana del vuelo | Verificar tendencia de viento, lluvia y alertas oficiales | No despegar: alerta activa por viento fuerte, lluvia intensa o tormenta |
| CPTEC/INPE (modelos) | 24 h antes + revision el dia del vuelo | Comparar escenarios de viento/nubosidad para reducir incertidumbre en la ventana de mision | No despegar: alta divergencia entre modelos y riesgo de inestabilidad en el horario previsto |
| Marina (DHN/CHM: marea y estado del mar) | 24 h antes e inmediatamente antes de la salida | Evaluar seguridad de navegacion, oleaje y condiciones costeras | No despegar: mar agitado/oleaje que comprometa acceso seguro de embarcacion y despegue del dron |
| METAR/TAF (REDEMET/aeropuerto mas cercano) | 2–6 h antes de la mision | Confirmar condiciones observadas en tiempo real y tendencia de muy corto plazo | No despegar: baja visibilidad, rafagas fuertes o celulas de lluvia aproximandose |
| Windy/Meteoblue (soporte visual) | Planificacion inicial y ajuste final | Visualizar viento por altitud y nubosidad; apoyo a la decision logistica | Usar solo como apoyo; la decision final debe seguir fuentes oficiales + observacion local |
| Observacion local en campo | Inmediatamente antes del despegue | Validar viento real, reflejo del agua, nubosidad baja y seguridad operativa | No despegar: rafagas por encima del limite del dron, lluvia, baja visibilidad o reflejo excesivo |
| Tipo de dron/escenario | Software recomendado | Fortaleza en el proyecto | Nota operativa |
|---|---|---|---|
| DJI Enterprise (Mavic 3E, Matrice) | DJI Pilot 2 | Mision automatizada de mapeo estable y rapida en campo | Estandarizar altitud, solape y velocidad entre campanas |
| DJI con flujo iPad | DJI GS Pro | Interfaz simple para grilla fotogrametrica | Verificar compatibilidad del modelo antes de la campana |
| Campanas enfocadas en fotogrametria academica | Pix4Dcapture Pro | Buena estandarizacion de mision e integracion con procesamiento | Mantener parametros fijos para comparacion temporal |
| Operacion multi-area con gestion en nube | DroneDeploy | Flujo de campo agil y centralizacion de misiones | Revisar costos/licencias para uso continuo |
| Misiones complejas y alta personalizacion | UgCS | Planificacion avanzada para escenarios costeros | Curva de aprendizaje mayor, pero mas control operativo |
| Plataformas ArduPilot/PX4 | QGroundControl o Mission Planner | Alta flexibilidad para parametrizacion tecnica | Verificar telemetria, failsafe y registros antes de cada mision |
Recomendacion operativa para este proyecto: decision de vuelo basada en fuentes oficiales (INMET + Marina + METAR), validada por observacion local en el punto de despegue, y uso de plan de vuelo estandarizado por sensor para garantizar comparabilidad entre campanas.
📷 Camara RGB
- Representacion visual detallada de litorales rocosos y rasgos geomorfologicos
- Excelente lectura de textura y contorno de parches
- Buena base para interpretacion manual y mapeo de referencia
🛰️ Camara multiespectral
- Mejor separacion de clases por firma espectral
- Permite calcular indices para apoyar clasificacion tematica
- Util para detectar variaciones sutiles no visibles en RGB
✅ Resultado esperado
- RGB como base cartografica de alta legibilidad visual
- Multiespectral para refinamiento tematico/ecologico
- Integracion de ambos sensores como estrategia preferente
5) Como los datos se vuelven decision
- QGIS y R: organizacion, analisis e integracion de datos.
- HSI: identifica areas con mayor potencial de habitat para macrofitas.
- SDMs (ODMAP): estiman la distribucion probable de especies segun el ambiente, de forma transparente y reproducible.
- Mapas finales: muestran areas prioritarias para monitoreo y conservacion.
6) Aseguramiento de calidad
- Metodo unico y replicable en las tres islas.
- Registros estandarizados para reducir sesgo de colecta.
- Datos y productos en formatos abiertos (GPKG, CSV y HTML).
- Trazabilidad desde datos de campo hasta analisis y mapa final.
Sintesis metodologica
Metodologia integrada, replicable y orientada a decision, que conecta observacion de campo, geotecnologias y modelado ecologico para apoyar el monitoreo y la gestion de habitats de macrofitas marinas.
📦 Productos Esperados
Los productos de esta investigacion fueron disenados para transformar datos de campo en evidencia util para la ciencia y la gestion costera. Cada entregable responde una etapa de la pregunta central del proyecto: donde estan las macrofitas, que condiciones favorecen su ocurrencia y como priorizar el monitoreo.
Entregables cientificos
- Inventario floristico comparativo: lista estandarizada de especies por isla, con registros de presencia y abundancia relativa.
- Modelos y mapas tematicos: productos cartograficos de distribucion y aptitud de habitat para apoyar la interpretacion ecologica.
- Base geoespacial estructurada: conjunto organizado de capas y tablas para uso en monitoreos futuros.
- Sintesis academica: disertacion de maestria y manuscrito cientifico para divulgacion de resultados.
Aplicacion practica de resultados
Ademas del resultado cientifico, los productos se entregaran en formato aplicable, con documentacion clara y organizacion estandarizada. Esto facilita su reutilizacion por equipos de investigacion, organismos ambientales e iniciativas de monitoreo de habitats insulares.
- Identificacion de areas prioritarias para monitoreo periodico.
- Linea base comparable para evaluar cambios temporales en las tres islas.
- Soporte tecnico para planificacion local de conservacion y gestion.
📚 Glosario
Terminos clave usados en esta presentacion, explicados en lenguaje simple. El objetivo es facilitar la lectura para no especialistas sin perder precision tecnica.
Ecologia y ambiente costero
Macrofitas marinas
Plantas y algas de mayor tamano que viven en el mar y ayudan a mantener el equilibrio ecologico.
Habitat
Lugar con las condiciones necesarias para que viva una especie (luz, sustrato, temperatura, etc.).
Aptitud de habitat
Nivel de favorabilidad de un lugar para la ocurrencia de una especie.
Litoral rocoso
Zona costera de rocas expuestas con muchas grietas y microambientes.
Sustrato
Superficie donde se fijan organismos, como roca, arena o sedimento.
Geomorfologia
Forma fisica del ambiente (paredes, lajas, bloques, grietas), importante para la biodiversidad.
Presion antropica
Impacto causado por actividades humanas (turismo, contaminacion, construccion, trafico de embarcaciones).
Conectividad
Grado de conexion entre areas; influye en la dispersion y recolonizacion de especies.
Trabajo de campo y colecta
Apnea
Buceo sin tanque, usado en zonas someras con operacion rapida.
SCUBA
Equipo autonomo de respiracion subacuatica, usado en zonas mas profundas.
Transecto
Linea de muestreo usada en campo para estandarizar observaciones entre areas.
Punto de muestreo
Ubicacion definida para colectar datos biologicos y ambientales.
DAFOR
Escala de abundancia: Dominante, Abundante, Frecuente, Ocasional y Rara.
Ejemplar
Muestra fisica colectada para confirmar identificacion y almacenarse en coleccion cientifica.
Herbario
Coleccion organizada de ejemplares vegetales usada como referencia cientifica.
Trazabilidad
Capacidad de vincular cada dato con su ubicacion, fecha, metodo y colector.
Lista de verificacion de campo
Lista de verificacion para garantizar seguridad, estandarizacion e integralidad del muestreo.
Georreferenciacion
Asociacion de datos con coordenadas geograficas exactas.
Mapeo, dron e imagenes
Fotogrametria
Tecnica que transforma multiples fotos en mapas y modelos con medidas reales.
Ortomosaico
Imagen aerea corregida, como un fotomapa sin distorsion relevante.
DSM (Digital Surface Model)
Modelo 3D de la superficie, incluyendo terreno y elementos sobre el suelo.
GSD (Ground Sampling Distance)
Tamano del pixel en el suelo. Menor pixel significa mayor detalle.
Solape frontal/lateral
Porcentaje de repeticion entre fotos para asegurar reconstruccion 3D estable.
RGB
Camara estandar (rojo, verde y azul) con excelente resolucion visual.
Multiespectral
Camara que registra bandas fuera del espectro visible, util para separar tipos de cobertura.
NDVI / GNDVI / NDRE
Indices de vegetacion calculados a partir de datos de reflectancia de luz.
EXIF
Metadatos de foto (fecha, hora, coordenadas y configuracion de camara).
Telemetria
Datos de vuelo registrados por el dron (altitud, velocidad, posicion, bateria).
GCP / Checkpoint
Puntos de control terrestre usados para ajustar y validar precision cartografica.
RMSE
Error cuadratico medio (RMSE), indicador de error de posicionamiento; cuanto menor, mejor.
Modelado y estadistica (lenguaje simple)
SIG (Sistema de Informacion Geografica)
Herramienta para combinar mapas, tablas y analisis en un mismo entorno.
HSI (Indice de Aptitud de Habitat)
Indice que resume si un lugar es mas o menos favorable para una especie.
SDM (Modelo de Distribucion de Especies)
Modelo que predice donde puede ocurrir una especie segun condiciones ambientales.
ODMAP
Estandar de documentacion que ayuda a explicar y reproducir modelos ecologicos.
Exactitud global
Porcentaje total de clasificaciones correctas en un mapa o modelo.
Kappa
Metrica de concordancia que descuenta aciertos por azar.
Matriz de confusion
Tabla que compara clase predicha con clase observada en campo.
Validacion
Etapa de prueba para verificar si el resultado es confiable.
Reproducibilidad
Capacidad de repetir el metodo y obtener resultados comparables.
Escenario climatico
Proyeccion de condiciones futuras usada para evaluar posibles desplazamientos en la distribucion de especies.
Planificacion y Operacion de Vuelo
Ventana operativa
Periodo con condiciones adecuadas para realizar campo y vuelos de dron con seguridad.
Despegar / No despegar
Decision de continuar o cancelar una mision con base en criterios previos de seguridad y calidad.
Pronostico meteorologico
Pronostico oficial usado para planificar y ajustar actividades de campo.
METAR / TAF
Mensajes meteorologicos aeroportuarios utiles para condiciones observadas y pronostico de muy corto plazo.
Estado del mar
Condiciones de oleaje y agitacion del agua, esenciales para seguridad en zonas costeras.
Failsafe
Modo de seguridad del dron activado ante perdida de senal o problemas criticos.
Estandarizacion de campana
Uso de los mismos parametros entre campanas para permitir comparaciones justas en el tiempo.
Contingencia
Plan alternativo para imprevistos (vientos fuertes, lluvia, mar agitado, falla tecnica).
📅 Cronograma (Mar/2026 – Dic/2027)
Inicio previsto: marzo de 2026
Duracion principal: 22 meses + etapa posterior a la defensa
El cronograma fue estructurado para mantener flujo continuo entre planificacion, campo, analisis y redaccion, reduciendo carga al final del programa y garantizando tiempo para validar resultados.
Cronograma visual (estilo Gantt)
Resumen por fase
| Fase | Periodo | Objetivo central |
|---|---|---|
| Fase 1 | M1–M5 | Fundamentacion teorica, diseno de muestreo y preparacion operativa |
| Fase 2 | M6–M10 | Primera campana de campo y consolidacion inicial de datos |
| Fase 3 | M11–M15 | Segunda campana, integracion final y modelado ecologico |
| Fase 4 | M16–M22 | Sintesis cientifica, calificacion, defensa y publicacion |
Detalle mes a mes (con entregables)
| Periodo | Actividades principales | Entregables previstos |
|---|---|---|
| M1–M2 | Inmersion bibliografica, alineacion metodologica y definicion final del diseno de muestreo. | Protocolo metodologico consolidado y plan de trabajo validado con la orientacion. |
| M3–M5 | Permisos, logistica de campo, estandarizacion de formularios y entrenamiento de colecta. | Lista de verificacion operativa completa y cronograma de campo finalizado. |
| M6–M8 | 1ra campana: inventario, DAFOR, variables ambientales y registros georreferenciados. | Datos primarios de campo (biologicos + ambientales + espaciales) organizados. |
| M9–M10 | Limpieza de datos, organizacion SIG y analisis descriptivo preliminar. | Mapas iniciales de ocurrencia e informe tecnico parcial de la campana 1. |
| M11–M13 | 2da campana para reforzar muestreo, validar patrones y cubrir vacios. | Datos integrados de ambas campanas y base geoespacial de trabajo final. |
| M14–M15 | Calculo de HSI, ejecucion de SDM y evaluacion de desempeno de modelos. | Mapas de aptitud y distribucion potencial con validacion estadistica. |
| M16–M18 | Interpretacion ecologica de resultados y redaccion de calificacion etapa 1. | Capitulos parciales y presentacion de calificacion intermedia (M18). |
| M19–M21 | Redaccion final de disertacion, revision tecnica y ajustes de figuras/tablas. | Version completa de disertacion lista para banca examinadora. |
| M22 | Defensa publica e incorporacion de recomendaciones de la banca. | Disertacion defendida y version final para deposito institucional. |
| Post-defensa (Ene/2028) | Conversion de resultados en manuscrito cientifico para revista. | Articulo enviado. |
Hitos academicos y de gestion
- M5: diseno de muestreo finalizado y campo listo.
- M10: campana 1 completada y primera sintesis espacial producida.
- M15: modelado HSI/SDM completado y validado.
- M18: calificacion intermedia con resultados robustos.
- M22: defensa publica y cierre academico.
- Post-defensa (Ene/2028): articulo cientifico enviado.
Logica de ejecucion y control
- Ritmo ciclico: cada fase combina colecta, organizacion y sintesis parcial para evitar acumulacion de tareas.
- Punto de control: al final de cada fase hay un entregable concreto para revision de orientacion.
- Ventana de contingencia: la secuencia permite margen para reprogramar salidas por condiciones meteorologicas/maritimas.
- Salida acumulativa: resultados de una fase alimentan directamente la siguiente (campo -> SIG -> modelado -> redaccion).
Factibilidad
El proyecto es factible por la alineacion entre el tema y la linea de investigacion de la orientacion, la disponibilidad de infraestructura de laboratorio en UFSC y un plan de campo compatible con el cronograma de maestria.